Антон Семенюта
Антон Семенюта Что у нас по сенсорам?
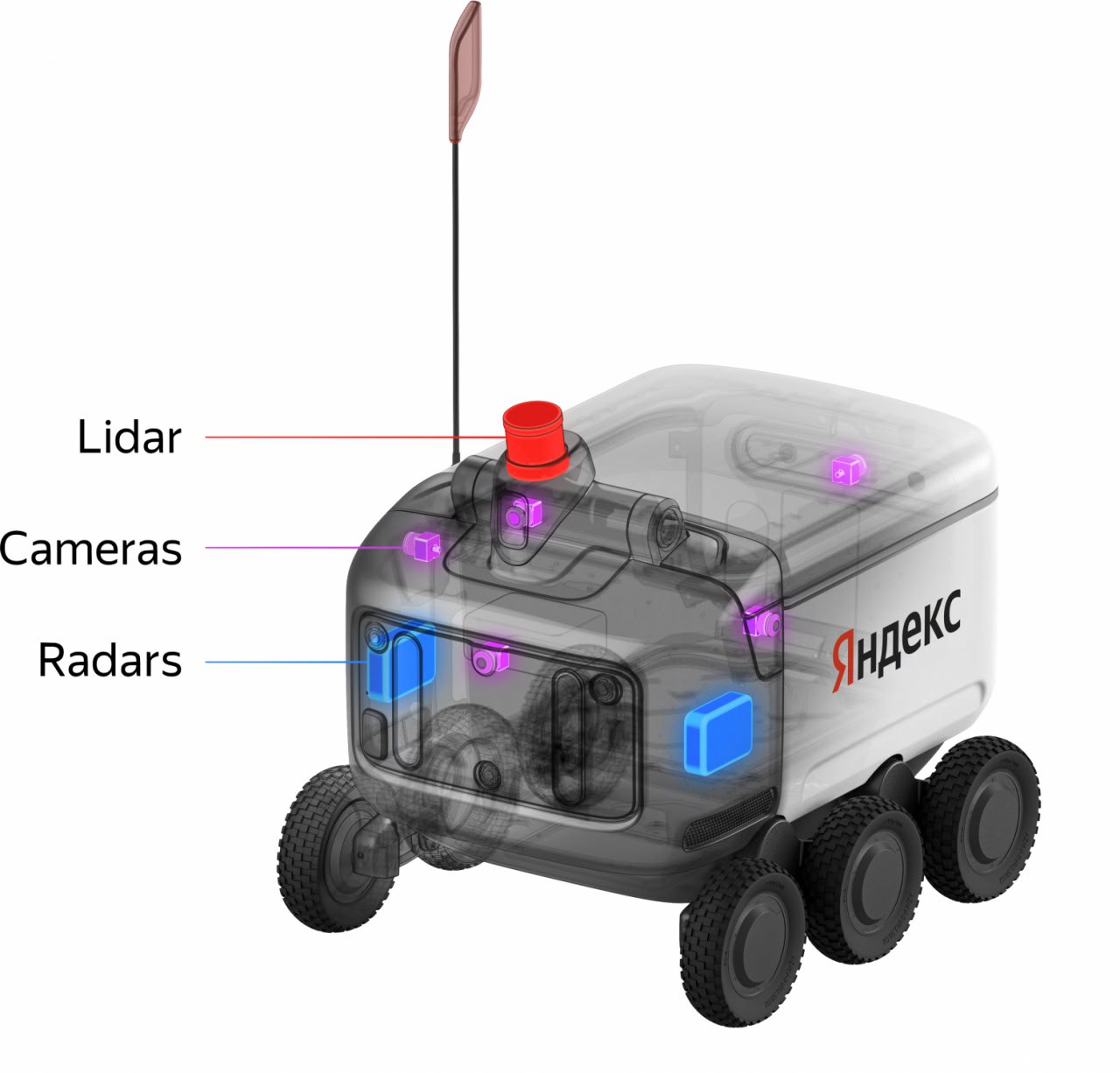
Все сенсоры можно разделить на две группы.
Первая существует для создания представления сцены вокруг нас в реальном мире.
Здесь используем лидары, радары, которые отдают нам облака точек, изображения с камер, а также данные парктроников.
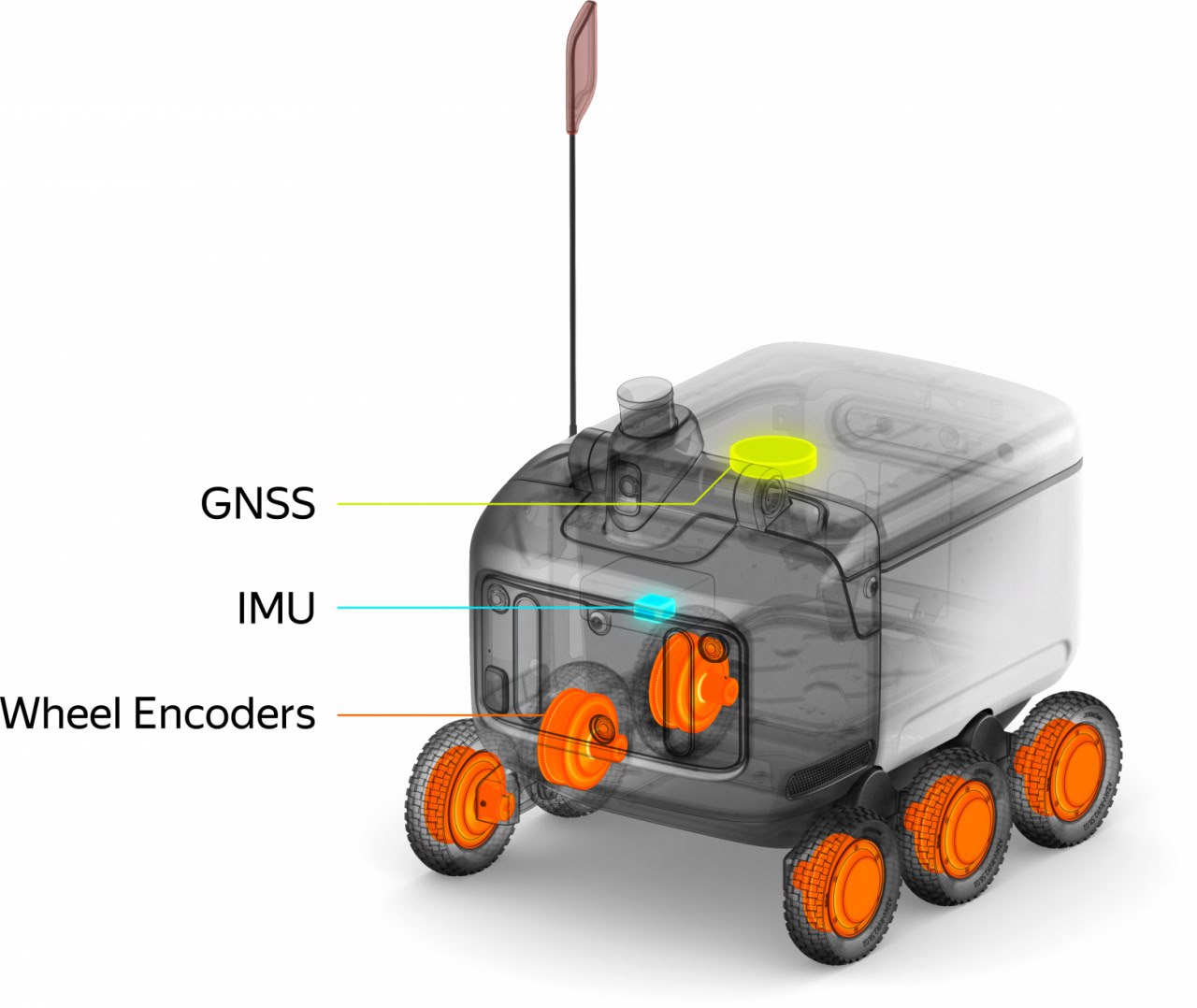
Ко второй относится всё, что касается системы ориентации:
- GNSS (ГЛОНАСС/GPS) — даёт глобальные координаты (широта/долгота). Минус: может терять сигнал в тоннелях или среди высоток.
- IMU (инерциальный блок) — отслеживает ускорения и повороты. Критически важен для точности, но может «врать» при сильной тряске.
- Колёсная одометрия — считает обороты колёс, чтобы оценить пройденный путь. Точно работает на коротких дистанциях, но ошибки накапливаются, особенно зимой, когда колёса пробуксовывают.
Что у нас по сенсорам?
1 / 2