Антон Семенюта
Антон Семенюта Начну с пары постов для "самых маленьких" о том, как в принципе реализуется такая автономность.
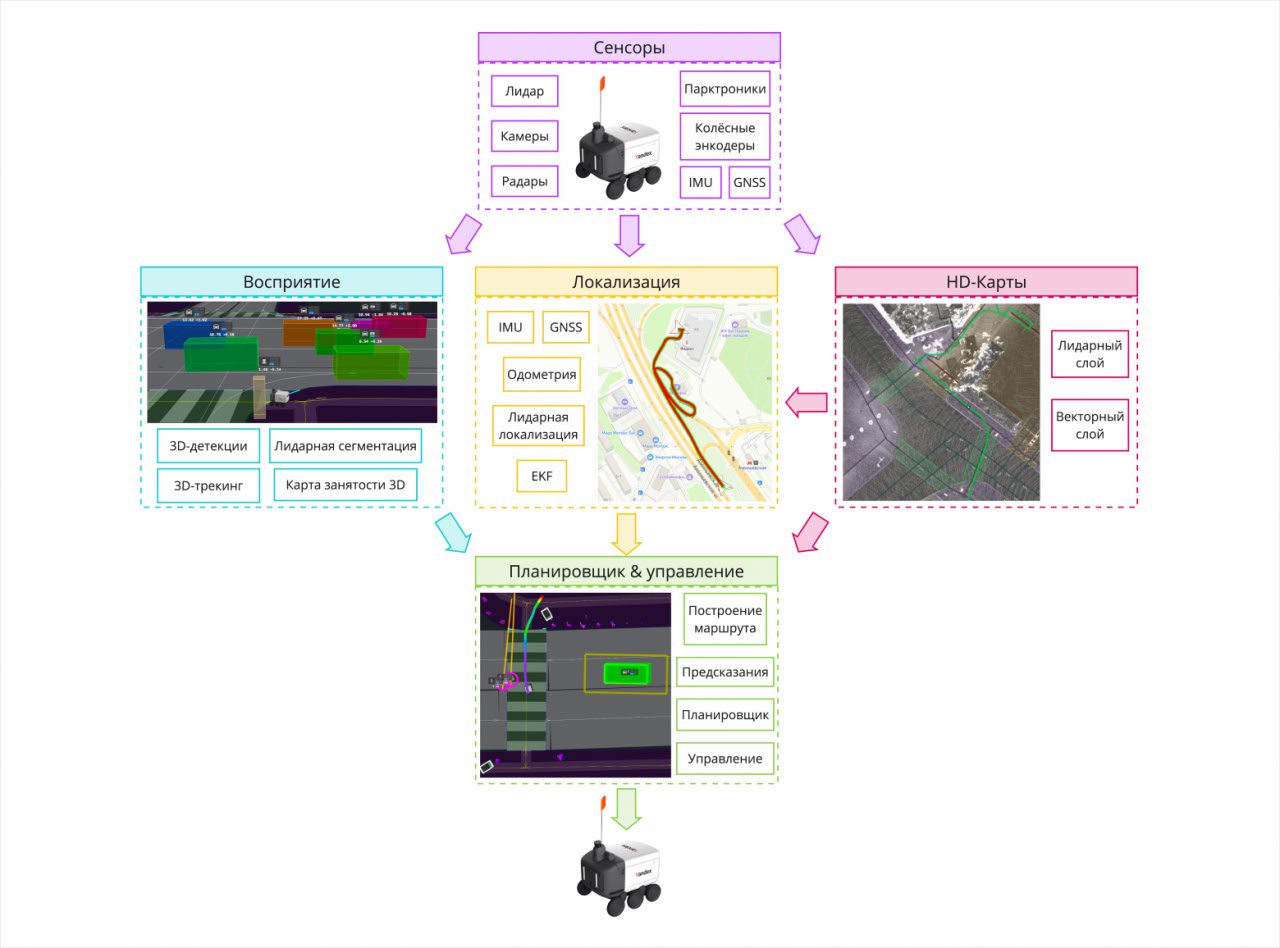
Любой автономный объект, будь то автомобиль или робот, имеет примерно один и тот же софтовый пайплайн восприятия и поведения.
Такой пайплайн состоит из:
- Сенсинг - получаем данные с сенсоров
- Локализация - понимаем, где мы находимся в мировых координатах
- Восприятие - переходим от сырых данных к пониманию сцены вокруг
- Предсказание - предугадываем действия других агентов
- Планирование - прокладываем свой путь
- Управление - передача сигнала непосредственно на систему управления автомобиля или робота.